4足歩行ロボット FabWalkerの組み立てから、ロボットを制御するプログラムの開発まで、ロボットの開発に必要な技術を学びます。 作成したロボットは自由に改造し、飾りつけを行って、自分専用のロボットにすることができます。
ロボットの制御にはスタディーノというArduino(アルディーノ)ベースのワンボードマイコンを使用します。FabWalkerは以下に示すような部品で構成されています。
 NPO法人 鎌倉シチズンネット(KCN)
NPO法人 鎌倉シチズンネット(KCN)KCNものづくり教室は4足歩行ロボットの製作を通じて、電子工作およびコンピュータによるロボット制御の方法を学び、ものづくりの楽しさを体験する講座です。 KCNプログラミング教室の受講者を対象にしていますが、Scratchを用いたプログラミングの多少の経験があれば受講することができます。
4足歩行ロボット FabWalkerの組み立てから、ロボットを制御するプログラムの開発まで、ロボットの開発に必要な技術を学びます。 作成したロボットは自由に改造し、飾りつけを行って、自分専用のロボットにすることができます。
ロボットの制御にはスタディーノというArduino(アルディーノ)ベースのワンボードマイコンを使用します。FabWalkerは以下に示すような部品で構成されています。
FabWalker
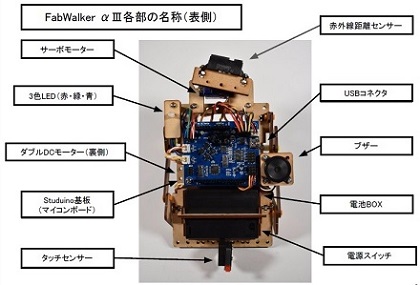
FabWalker構成部品(表側)
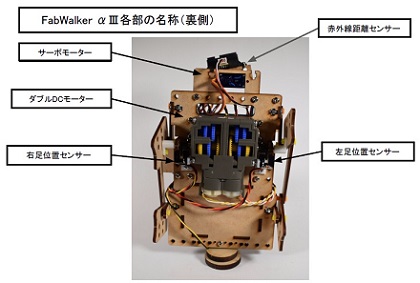
FabWalker構成部品(裏側)
ロボットを制御するプログラムは、Scratch1.4をベースにした「スタディーノブロックプログラミング環境」と呼ばれるPC上の環境で開発します。 「スタディーノブロックプログラミング環境」はこちらからダウンロードできます。
PC上でプログラムを作成した後、USBケーブルで接続されたスタディーノへプログラムを転送し、スタディーノ上で実行させます。
パソコンは教室備え付けのものを使用しますが、ノートPCをお持ちの方はご持参していただくと、予習・復習に便利です。Windows 7以降、Mac OS X(10.6以降)などのPCであれば機種は問いません。
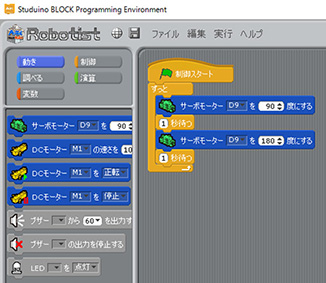
スタディーノブロックプログラミング環境
| タイトル | 学習内容 | |
|---|---|---|
| 第1回 | ロボットの組み立て | 4足歩行ロボットFabWalkerの組み立て |
| 第2回 | プログラム関数を作ろう | LED関数、ブザー関数、首振り関数、前進後退関数、スピード関数 |
| 第3回 | 動きを作ろう | ノッシノッシと歩かせる、腹ペコを表現する、障害物を見つけたときの処理を作る、
スピードの微調整、スピードによってLEDの色を変える |
| 第4回 | 障害物を回避しよう | 障害物を見つける距離、障害物を検出する角度の調整、 障害物を見つけたときの後退する距離 発表と講評 |